张量的存储视图
在底层代码种,张量中的被分配到由torch.storage实例所管理的连续内存块当中,存储区是由数字数据所组成的一维数组,即包含给定类型的数字的连续内存块,如下图所示
1 | ----------------| 张量(引用相同的储存区) |-----------------| |
索引储存区
在实际中如何使用二位点来索引储存区,可以使用storage()访问给定张量的存储区:
1 | points = torch.tensor([[4.0, 1.0], [5.0, 3.0], [2.0, 1.0]]) points.storage() |
在底层中,事实上储存的是一个连续的大小为6的连续数组,但是在你打印的时候是会自动进行还原的,我们可以手动索引储存区
1 | a = torch.tensor([[1,2],[2,3],[3,4]],dtype=torch.float32) |
不能使用两个索引来索引二维张量的存储区,不管和存储区相关的任何其他张量的维度是多少,他的布局始终都是一维,也可以通过索引直接改变存储区的值
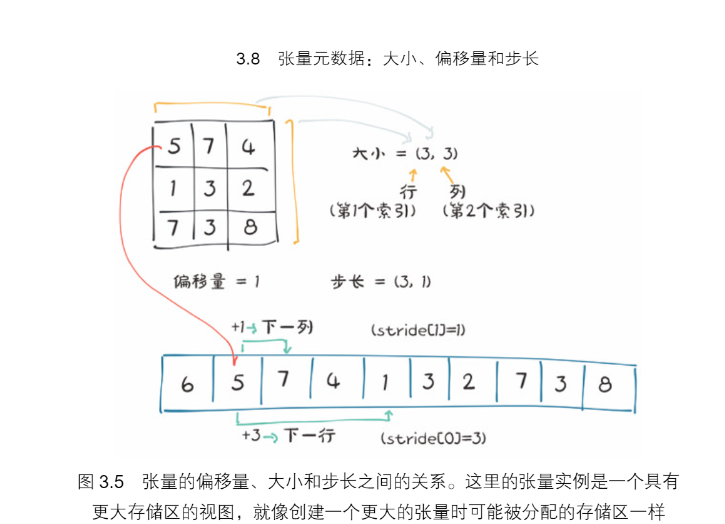
张量元数据
为了在存储区中建立索引,张量依赖于一些明确定义他们的信息,大小,偏移量和步长,大小,在numpy中又被称之为形状是一个元组,表示张量在每一个维度上有多少元素,偏移量就是指存储区中某元素相对第一个元素的索引,步长是指存储区中为了获得下一个元素需要跳过的元素的数量
另一个张量的存储视图
我们可以通过提供相应的索引来得到张量中的第二个点,
1 | points = torch.tensor([[4.0, 1.0], [5.0, 3.0], [2.0, 1.0]]) second_point = points[1] |
函数size和shape属性所包含的信息是一致的
1 | second_point.shape |
步长是一个元素,知识当索引在每一个维度增加1的时候在存储区中必须要跳过的元素的数量,
1 | 例如points的步长为(2,1),意思就是 |
使用stride方法就可以获取到步长
当我们索引一个特定的点,同时看到偏移量增加,表名我们已经提取了一个子张量
1 | second_point = points[1] |
正如预期的那样,子张量的维度少了一维,但仍然能索引到与原始张量相同的存储区,更改子张量也会对原始张量产生影响
1 | points = torch.tensor([[4.0, 1.0], [5.0, 3.0], [2.0, 1.0]]) second_point = points[1] |
可以使用clone方法将这个子张量复制成一个新的张量
1 | points = torch.tensor([[4.0, 1.0], [5.0, 3.0], [2.0, 1.0]]) second_point = points[1].clone() |
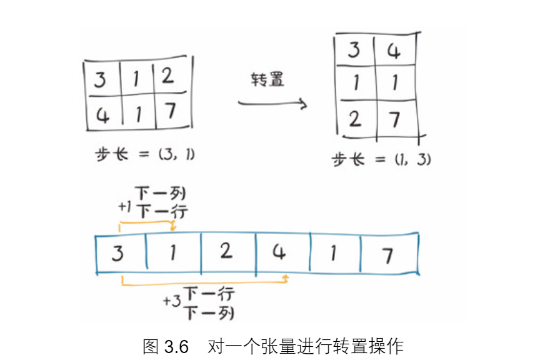
无复制转置
使用张量points,它在行中有单独的点,在列中有x和y的坐标,然后将其转置,使各个点都在列中,使用t()方法,用于转置一个矩阵
并且这样转置出来的矩阵和原矩阵共用一个存储区
1 | points = torch.tensor([[4.0, 1.0], [5.0, 3.0], [2.0, 1.0]]) |
只是在形状和步长上有所不同
将张量转置之后,如下图所示,我们在步长中改变元素顺序之后,增加的行将沿着存储区跳跃一个单位,就像沿着原张量的列移动一样,转置不会分配新的内存只是创建一个tensor的实例
连续张量
在pytorch中一些张量操作只对连续的张量起作用,使用contifuous方法可以将一个不连续的张量转换成一个连续的张量,但是步长和存储发生了改变
1 | points = torch.tensor([[4.0, 1.0], [5.0, 3.0], [2.0, 1.0]]) 、points_t = points.t() #转置 |
将张量存储到Gpu
pytorch最重要的能够大幅提升运行速度的特性就是可以在gpu上和cpu上同时与逆行,以大规模的提升运算速度
管理张量的设备属性
pytorch张量还有device的概念,就是张量数据在计算机上的位置
1 | points_gpu = torch.tensor([[4.0, 1.0], [5.0, 3.0], [2.0, 1.0]], device='cuda') |
可以使用to方法将在cpu上创建的张量复制到gpu上:
1 | points_gpu = points.to(device='cuda') |
这样将会返回一个新的张量
序列化张量
创建动态的张量是很好的,但是如果里面的数据是有价值的,我们希望将其保存到一个文件当中,可以免去每次运行程序的时候都要从头开始对模型进行训练,可以使用pickle来序列化张量对象,并为存储添加专用的序列化代码,
1 | torch.save(points, '../data/p1ch3/ourpoints.t') |
加载张量同样可以通过一行代码来实现
1 | points = torch.load('../data/p1ch3/ourpoints.t') |
用这种方法可以快速的保存张量和使用张量